

ICM SdMobi1 – Connected E-Vehicles
- Contact:
- Project group:
Prof. Sax
- Funding:
Ministerium für Wissenschaft, Forschung und Kunst Baden-Württemberg
- Partner:
Institutes of the University of Stuttgart: IAS, IFS, IEW
Institutes of the Karlsruhe Institute for Technology: ITIV, FAST
- Startdate:
01.07.2021
- Enddate:
31.12.2023
ICM SdMobi1 – Connected E-Vehicles
InnovationsCampus Mobility of the Future (ICM): SdMobi1
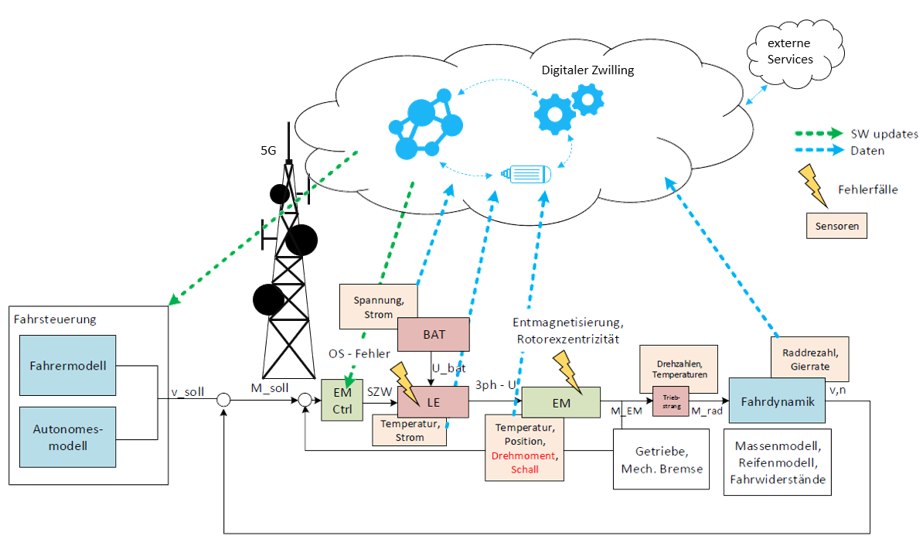
Connected e-vehicles: Improving product creation and operation by detecting fault and exceptional situations in the powertrain and driving dynamics.
Project goals
The increasing automation of vehicles with simultaneous electrification of powertrains increases the risks in terms of Safety-applications. Fault and exceptional situations occurring in the powertrain and driving dynamics of electric vehicles must be detected and dealt with at an early stage in order to ensure safety. Monitoring by means of modern communication and information technologies enables the detection of these fault and exceptional situations in real time and supports the influencing of safety-critical driving functions. In order to take advantage of the long-term experience gained during operation, the knowledge gained about the condition of the vehicle must be fed back into product development.
5G technology helps in networking vehicles, its components, and exchanges with the digital twin in the cloud, and is hereby suitable for the flow of insights from operation back into product creation and production. AI-supported methods help to control and improve failure and exceptional cases of the vehicle, powertrain and vehicle dynamics "online" in simulation and prototype.
ITIV participation
ITIV participates in the detection of fault and exception situations using AI-based techniques to increase system intelligence. As part of the continuous software improvement, ITIV is assisting in the creation of a suitable concept that will also be used on the ICM testbed. Continuous software improvement includes the transmission of fleet data to the backend in real time and the matching of vehicle state and digital twin in the cloud. The key task of the ITIV is to detect deviations between the vehicle condition and the digital twin. In the event of error and exception situations, the ITIV is concerned on the one hand with the transmission of software patches for automatic remedial action over-the-air and on the other hand with further investigations of newly occurring error and exception situations. Another ITIV objective is the implementation of optimized flashing of the test vehicle and its components, in order to optimize future flashing at the end of the line to be able to carry out.