


Julian Höfer, M.Sc.
- Member of Scientific Staff
- Group: Prof. Becker
- Room: 217
CS 30.10 - Phone: +49 721 608-41310
- julian hoefer ∂does-not-exist.kit edu
- Engesserstr. 5
76131 Karlsruhe
Reliable AI models and accelerators in safety-critical environments
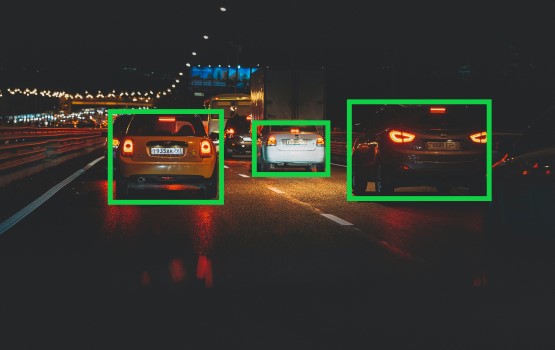
The basis for autonomous driving and other safety-critical applications is reliable perception of the near environment using cameras, as well as radar and lidar sensors. Machine learning, e.g. Convolutional Neural Networks, provide the best results for object detection. The current challenge is to integrate these neural networks into embedded systems while ensuring reliability. In particular, random hardware faults in AI accelerators as well as the inability of neural networks to estimate their own uncertainty still prevent safety-critical deployment.

AI accelerator - algorithm co-design and design space exploration
With the growing number of applications for machine learning, the requirements not only increase in terms of algorithmic accuracy, but also in terms of hardware complexity. Important goals are the minimization of memory demands and the reduction of power consumption. Optimizations are possible not only on the algorithmic level but also on the hardware architecture level. The trade-offs must be mutually weighed for the respective application to find the best solution. Co-design methods and the targeted exploration of the design space achieve the best results.
Energy-efficient AI hardware accelerators
Nowadays, machine learning can already solve complex problems in image processing for autonomous driving, industrial automation or fault detection surprisingly well. A disadvantage of such systems still remains the high computational effort and associated power requirements. For this reason, both in research and in industry (Google, Tesla, ...), special hardware architectures are being developed to implement the algorithms efficiently. At ITIV, we are working on new concepts and ideas for hardware acceleration in the field of machine learning and artificial intelligence.
| lv-no. | title | type | semester |
|---|---|---|---|
| 2311617 | Tutorial for 2311615 Digital Technology / Fundamentals of Digital Technology | Practice (Ü) | WS 25/26 |
| 2311170 | Tutorials for 2311615 Digital technology / Fundamentals of digital technology | Tutorial (Tu) | WS 22/23 |
Supervised student works (selection)
- BA: „Robustness of Systolic Arrays in Regards to Partial Failures of Computation Units“
- MA: „Modelling and Simulation of Built-in self-test Concepts for Hardware Defect Detection on AI Accelerators“
- BA: „Evaluation of Methods for Sampling-based Uncertainty Estimation in Deep Learning-based Object Detection“
Publications
Gutermann, A.; Serdyuk, A.; Lesniak, F.; Hoefer, J.; Kiesa, H. T.; Harbaum, T.; Becker, J.; Pachideh, B.; Nitzsche, S.; Neher, M.; Weigelt, C.; Krausse, J.; Pazmino, V.; Knobloch, K.; Groth, L.; Nešković, A.; Mulhem, S.; Berekovic, M.
2026. 2026 Design, Automation & Test in Europe Conference (DATE), 1–7, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/DATE69613.2026.11539165
Sotiropoulos, G.; Frombach, F.; Hoefer, J.; Harbaum, T.; Becker, J.; Thorøe, H. I.; Meyers, V.; Tahoori, M.; Demirdag, Z.; Sikal, M. B.; Nassar, H.; Khdr, H.; Henkel, J.; Wolters, C.; van Kempen, P.; Geier, J.; Schlichtmann, U.; Sesli, B.; Sabih, M.; Wittmann, J.; Hannig, F.; Teich, J.; Steiner, L.; Wehn, N.; Ali, M. S.; Schmitz, P.; Kunz, W.; Koegler, S.; Sigl, G.
2026. 2026 Design, Automation & Test in Europe Conference (DATE), Verona, Italy, 20-22 April 2026, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/DATE69613.2026.11539555
Mojumder, S.; Friedrich, S.; Matúš, E.; Lüders, M.; Friedrich, M.; Renke, O.; Blume, H.; Kock, M.; Schewior, G.; Grantz, D.; Benndorf, J.; Hoefer, J.; Schmidt, P.; Becker, J.; Fasfous, N.; Mori, P.; Vögel, H.-J.; Ahmadifarsani, S.; Kontopoulos, L.; Schlichtmann, U.; Li, Y.-J.; Fettweis, G. P.
2025. IEEE Transactions on Very Large Scale Integration (VLSI) Systems, 33 (11), 2961–2974. doi:10.1109/TVLSI.2025.3603887
Hoefer, J.; Lesniak, F. M.; Gutermann, A.; Wöran, F.; Harbaum, T.; Becker, J. E.
2025. 2025 IEEE 38th International System-on-Chip Conference (SOCC), Dubai, 29th September 2025 - 1st October 2025, 1–6, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SOCC66126.2025.11235419
Karle, C.; Fuerst-Walter, I.; Schade, F.; Hoefer, J.; Lesniak, F.; Harbaum, T.; Becker, J.
2025. 2025 IEEE 4th German Education Conference (GECon), Hamburg, 21st-23rd July 2025, 1–5, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/GECon64629.2025.11369364
Tahoori, M.; Meyers, V.; Sadeghipour Roodsari, M.; Xu, H.; Becker, J.; Harbaum, T.; Frombach, F.; Hoefer, J.; Sotiropoulos, G.; Henkel, J.; Demirdag, Z.; Khdr, H.; Nassar, H.; Schlichtmann, U.; Geier, J.; van Kempen, P.; Sigl, G.; Koegler, S.; Probst, M.; Teich, J.; Hannig, F.; Sabih, M.; Sesli, B.; Wehn, N.; Steiner, L.; Kunz, W.; Shelkamy Ali, M.
2025. Proceedings of the International Conference on Hardware/Software Codesign and System Synthesis; Taipeh, Taiwan, 28.09.-03.10.2025, 23–32, Association for Computing Machinery (ACM). doi:10.1145/3742873.3756928
Hoefer, J.; Schmidt, P.; Toto-Kiesa, H.; Hoefer, S.; Schewior, G.; Engelke, D.; Eickel, K.-H.; Grantz, D.; Harbaum, T.; Becker, J.
2025. Proceedings of the Great Lakes Symposium on VLSI 2025, 704–711, Association for Computing Machinery (ACM). doi:10.1145/3716368.3735208
Kreß, F.; Hoefer, J.; Lin, Q.; Schmidt, P.; Zhu, Z.; Zhu, Y.; Harbaum, T.; Wang, Y.; Becker, J.
2025. 2025 26th International Symposium on Quality Electronic Design (ISQED), 23rd-24th April 2025, San Francisco, 1–8, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ISQED65160.2025.11014471
Mojumder, S.; Friedrich, S.; Matúš, E.; Fettweis, G.; Lueders, M.; Friedrich, M.; Renke, O.; Blume, H.; Hoefer, J.; Schmidt, P.; Becker, J.; Grantz, D.; Kock, M.; Benndorf, J.; Fasfous, N.; Mori, P.; Voegel, H.-J.; Ahmadifarsani, S.; Kontopoulos, L.; Schlichtmann, U.; Bierzynski, K.
2024. 2024 IEEE Nordic Circuits and Systems Conference (NorCAS), Lund, Sweden, 29-30 October 2024, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/NorCAS64408.2024.10752454
Hoefer, J.; Stammler, M.; Kreß, F.; Hotfilter, T.; Harbaum, T.; Becker, J.
2024. IEEE International Symposium on Defect and Fault Tolerance in VLSI and Technologisch Systems (DFT), Didcot, United Kingdom, 08-10 October 2024, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/DFT63277.2024.10753546
Stammler, J. M.; Hoefer, J.; Schmidt, P.; Harbaum, T.; Becker, J.
2024. 2024 IEEE Computer Society Annual Symposium on VLSI (ISVLSI), 656 – 660, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ISVLSI61997.2024.00125
Neu, M.; Karle, C.; Schmidt, P.; Höfer, J.; Harbaum, T.; Becker, J.
2024. IEEE 37th International System-on-Chip Conference (SOCC 2024), 6 S., Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SOCC62300.2024.10737798
Kreß, F.; Serdyuk, A.; Kobsar, D.; Hotfilter, T.; Höfer, J.; Harbaum, T.; Becker, J.
2024. 2024 IEEE 37th International System-on-Chip Conference (SOCC), Dresden, Germany, 16-19 September 2024, 126–131, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SOCC62300.2024.10737863
Kreß, F.; El Annabi, E. M.; Hotfilter, T.; Hoefer, J.; Harbaum, T.; Becker, J.
2024. 2024 IEEE Computer Society Annual Symposium on VLSI (ISVLSI), 1st-3rd July 2024, Knoxville, 39–44, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ISVLSI61997.2024.00019
Hoefer, J.; Gauß, M.; Adams, M.; Kreß, F.; Kempf, F.; Karle, C.; Harbaum, T.; Barth, A.; Becker, J.
2024. 2024 IEEE International Symposium on Circuits and Systems (ISCAS), Singapore, Singapore, 19-22 May 2024, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ISCAS58744.2024.10557955
Stammler, M.; Höfer, J.; Kraus, D.; Schmidt, P.; Hotfilter, T.; Harbaum, T.; Becker, J.
2023. Procedia Computer Science, 222, 499 – 508. doi:10.1016/j.procs.2023.08.188
Kreß, F.; Sidorenko, V.; Schmidt, P.; Hoefer, J.; Hotfilter, T.; Walter, I.; Harbaum, T.; Becker, J.
2023. Computer Networks, 229, Article no: 109759. doi:10.1016/j.comnet.2023.109759
Vögel, H.-J.; Becker, J.; Benndorf, J.; Bierzynski, K.; Blume, H.; Fettweis, G.; Friedrich, M.; Friedrich, S.; Grantz, D.; Höfer, J.; Kempf, F.; Lueders, M.; Teepe, G.
2023. MikroSystemTechnik Kongress 2023; Kongress, 889–894, VDE Verlag
Kempf, F.; Hoefer, J.; Harbaum, T.; Becker, J.; Fasfous, N.; Frickenstein, A.; Voegel, H.-J.; Friedrich, S.; Wittig, R.; Matúš, E.; Fettweis, G.; Lueders, M.; Blume, H.; Benndorf, J.; Grantz, D.; Zeller, M.; Engelke, D.; Eickel, K.-H.
2023. 2023 Design, Automation & Test in Europe Conference & Exhibition (DATE), Antwerp, Belgium, 17-19 April 2023, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/DATE56975.2023.10137257
Kreß, F.; Serdyuk, A.; Hiegle, M.; Waldmann, D.; Hotfilter, T.; Hoefer, J.; Hamann, T.; Barth, J.; Kämpf, P.; Harbaum, T.; Becker, J.
2023. 26th Euromicro Conference on Digital System Design (DSD 2023), 569–576, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/DSD60849.2023.00084
Kempf, F.; Höfer, J.; Hotfilter, T.; Becker, J.
2023. 2023 IEEE 16th International Symposium on Embedded Multicore/Many-core Systems-on-Chip (MCSoC), 276 – 283, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/MCSoC60832.2023.00048
Hotfilter, T.; Hoefer, J.; Merz, P.; Kreß, F.; Kempf, F.; Harbaum, T.; Becker, J.
2023. 2023 IEEE 36th International System-on-Chip Conference (SOCC), Santa Clara, USA, 05-08 September 2023, 1–6, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SOCC58585.2023.10256738
Hoefer, J.; Hotfilter, T.; Kreß, F.; Qiu, C.; Harbaum, T.; Becker, J.
2023. Computer Vision Systems – 14th International Conference, ICVS 2023, Vienna, Austria, September 27–29, 2023. Ed.: H. Christensen, 299–309, Springer Nature Switzerland. doi:10.1007/978-3-031-44137-0_25
Hotfilter, T.; Höfer, J.; Kreß, F.; Kempf, F.; Kraft, L.; Harbaum, T.; Becker, J.
2023. 2023 IEEE 5th International Conference on Artificial Intelligence Circuits and Systems (AICAS), 1–5, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/AICAS57966.2023.10168566
Hoefer, J.; Kempf, F.; Hotfilter, T.; Kreß, F.; Harbaum, T.; Becker, J.
2023. Proceedings of the Great Lakes Symposium on VLSI 2023, 287–292, Association for Computing Machinery (ACM). doi:10.1145/3583781.3590226
Hotfilter, T.; Schmidt, P.; Höfer, J.; Kreß, F.; Harbaum, T.; Becker, J.
2023. DroneSE and RAPIDO: System Engineering for constrained embedded systems, 73–78, Association for Computing Machinery (ACM). doi:10.1145/3579170.3579258
Kreß, F.; Hoefer, J.; Hotfilter, T.; Walter, I.; El Annabi, E. M.; Harbaum, T.; Becker, J.
2023. Machine Learning and Principles and Practice of Knowledge Discovery in Databases. Hrsg.: I. Koprinska. Pt. 1, 557–568, Springer International Publishing. doi:10.1007/978-3-031-23618-1_37
Kempf, F.; Höfer, J.; Kreß, F.; Hotfilter, T.; Harbaum, T.; Becker, J.
2022. Conference Proceedings: 2022 IEEE 35th International System-on-Chip Conference (SOCC) Ed.: S. Sezer, 1–6, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SOCC56010.2022.9908110
Kreß, F.; Hoefer, J.; Hotfilter, T.; Walter, I.; Sidorenko, V.; Harbaum, T.; Becker, J.
2022. 18th International Conference on Distributed Computing in Sensor Systems (DCOSS), 133–140, IEEEXplore. doi:10.1109/DCOSS54816.2022.00034
Kreß, F.; Serdyuk, A.; Hotfilter, T.; Höfer, J.; Harbaum, T.; Becker, J.; Hamann, T.
2022. 2022 11th Mediterranean Conference on Embedded Computing (MECO). Ed.: IEEE, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/MECO55406.2022.9797131
Fasfous, N.; Vemparala, M. R.; Frickenstein, A.; Valpreda, E.; Salihu, D.; Höfer, J.; Singh, A.; Nagaraja, N.-S.; Voegel, H.-J.; Vu Doan, N. A.; Martina, M.; Becker, J.; Stechele, W.
2022. Proceedings of the 2022 Design, Automation & Test in Europe Conference & Exhibition (DATE 2022). Ed.: C. Bolchini, 238–243, Institute of Electrical and Electronics Engineers (IEEE). doi:10.23919/DATE54114.2022.9774574
Walter, I.; Ney, J.; Hotfilter, T.; Rybalkin, V.; Hoefer, J.; Wehn, N.; Becker, J.
2022. Machine Learning and Principles and Practice of Knowledge Discovery in Databases – International Workshops of ECML PKDD 2021, Virtual Event, September 13-17, 2021, Proceedings, Part I. Ed.: M. Kamp, 339–350, Springer International Publishing. doi:10.1007/978-3-030-93736-2_26
Hotfilter, T.; Hoefer, J.; Kreß, F.; Kempf, F.; Becker, J.
2021. IEEE 34th International System-on-Chip Conference (SOCC), 14th-17th September 2021, Las Vegas, Nevada, USA, 83–88, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/SOCC52499.2021.9739212
Fasfous, N.; Vemparala, M.-R.; Frickenstein, A.; Badawy, M.; Hundhausen, F.; Höfer, J.; Nagaraja, N.-S.; Unger, C.; Vögel, H.-J.; Becker, J.; Asfour, T.; Stechele, W.
2021. 2021 IEEE International Conference on Robotics and Automation (ICRA): 30 May – 5 June 2021, Xi’an, China, 13430–13437, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ICRA48506.2021.9561045