

Design and implementation of an interactive controller concept
- Subject:Service Oriented Architecture, Regelungstechnik, Automatisiertes Fahren
- Type:Bachelorarbeit
- Date:ab 08 / 2024
- Tutor:
Design and implementation of an interactive controller concept
Context
Scalable, automated driving functions enable a significant improvement in road safety by reducing human error. The technology is not subject to distraction or fatigue, which often lead to traffic accidents, and therefore has the potential to drastically reduce the number of accidents.
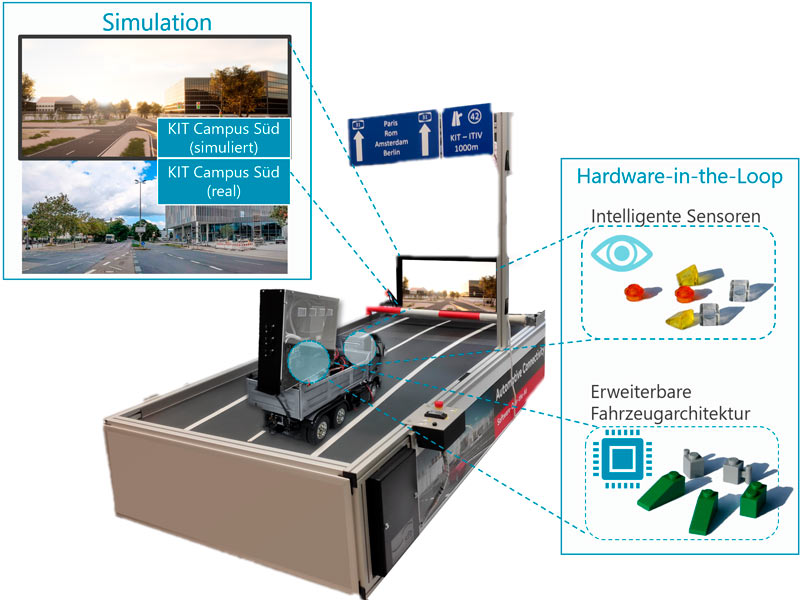
One aim of this thesis is to illustrate the functionality and benefits of the assistance systems. By modifying and extending a demonstrator, the various assistance systems can be experienced in action.
Goals
- Modeling of the overall vehicle system and driving trajectory
- Design and validation of the controller for longitudinal and lateral guidance
- Integration of the controller with an open-source simulation environment
- Development of an HMI interface for interaction with the controllers
Requirements
- Good programming skills (C++ and/or Python, Matlab/ Simulink)
- Knowledge in the field of control engineering
- Experience with Linux is helpful