ARoMA (Adaptively Redundant Many-core Architecture)
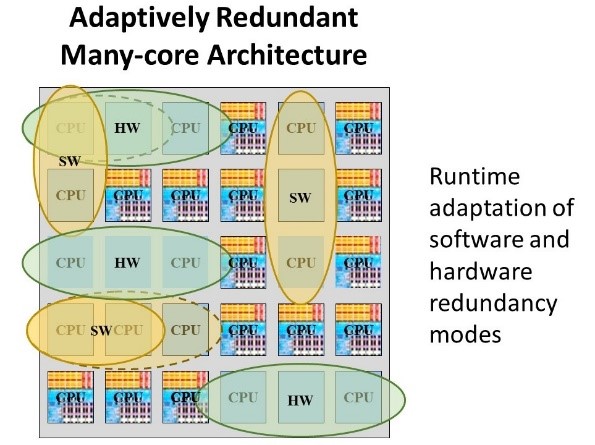
Safety-critical systems require redundancy for fault-detection and fault-tolerance. Depending on the application mode or execution state, different types of redundancy are required: Dual Modular Redundancy (DMR) for fail-safe modes and Triple Modular Redundancy (TMR) or even higher redundancy for fail-operational modes. Future safety-critical systems will feature mode switching between application of different criticality and fault-tolerance demands requiring more dynamicity in redundancy modes.
An example in automotive may be switching from parking assistant to piloted driving with much higher safety demands, but executed on the same embedded multi-core. This project investigates the dynamic switching between redundancy modes depending on external causes. We call this dynamic redundancy. We investigate dynamic redundancy switching between hardware modes (no redundancy, DMR, and TMR), same for software modes and combinations.