


M. Sc. Maximilian Kirschner
- ESS/ Research Associate
- Group: Prof. Becker
- Phone: +49 721 9654 186
- kirschner ∂does-not-exist.fzi de
- www.fzi.de/team/maximilian-kirschner/
Forschungszentrum Informatik (FZI)
Haid- und Neu-Str. 10 - 14
76131 Karlsruhe

Time-Predictable Hardware Architectures
The main goal of time-predictable hardware is to guarantee the temporal properties and deterministic behaviour of the system in order to satisfy real-time requirements. The main objective is to avoid so-called timing anomalies. Hardware optimised for predictability often offers lower peak performance or a limited set of functions. The use of timing-predictable hardware is particularly useful in domains where response times are critical (e.g. automated driving, robotics or aerospace technology).
Artificial Intelligence in Embedded Systems
The integration of artificial intelligence into embedded systems offers several advantages: The models are often optimised for limited resources, which is particularly beneficial in terms of energy consumption in battery-powered devices. Local processing of sensor data reduces latency, which is necessary in automated driving or robotics applications, where fast reactions are crucial. The biggest challenge here is the ever-increasing model size and complexity of current AI-based applications.
Compilers and Tools for the Estimation of the Worst-Case Execution Time
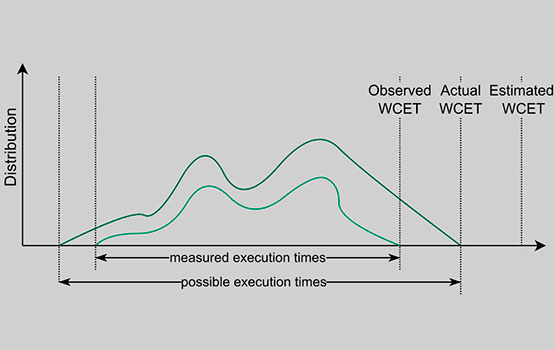
In real-time critical domains, it is important to estimate the Worst-Case Execution Time (WCET). Tools that model the hardware and identify the longest possible path in the program are employed. The longest possible path depends not only on the hardware and the application itself, but also on the compiler used. On the one hand, the WCET helps to ensure that hard time limits are met, and on the other hand, the analysis provides clues for possible optimisation in the application.
| Title | Type | Date |
|---|---|---|
| MLIR Machine-Learning Compiler for RISC-V vector processors | Bachelorarbeit | from 01 / 2025 |