

EMDRIVE
- Contact:
- Project group:
Prof. Becker
- Funding:
Bundesministerium für Bildung und Forschung (BMBF)
- Partner:
Infineon Technologies AG, Continental Teves AG & Co. oHG, ZF Friedrichshafen AG, Elektrobit Automotive GmbH, Siemens AG, Kernkonzept GmbH, Ambrosys GmbH, FZI, Uni Lübeck, TU München, Fraunhofer ENAS
- Startdate:
01.02.2022
- Enddate:
31.01.2025
EMDRIVE
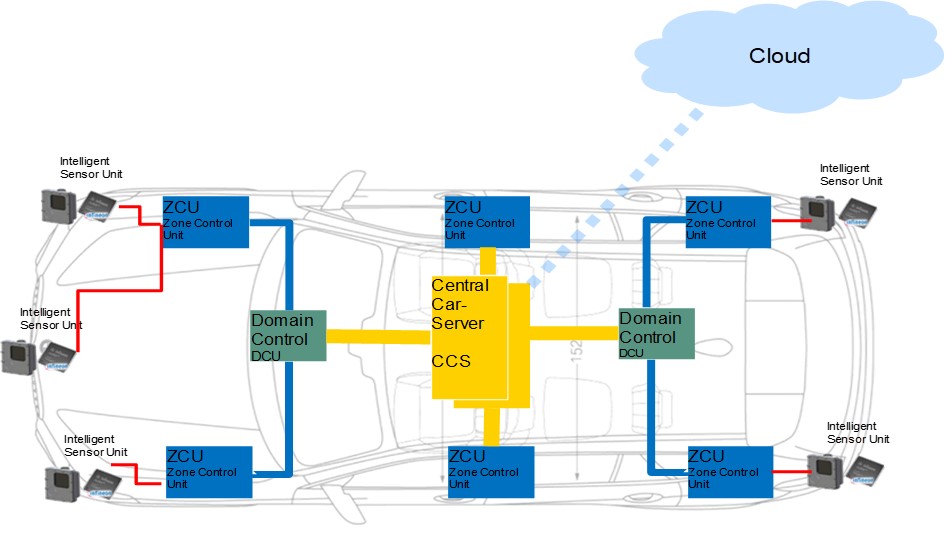
Platform for Distributed Heterogeneous Automotive Real-Time Computing Network Architectures
Project goals
With the goal of autonomous driving vehicles, trials demonstrate the technical feasibility of perfected systems, but not the economic use as a reliable mass product. Energy consumption, real-time computing power and hardware costs will not meet future requirements for compute on-board networks in cars. With more and more new applications, the amount of information to be processed as well as the overall complexity increases many times over. Dynamic controllability: One way out is new approaches to process the large amount of data in a scalable manner with minimum energy and cost expenditure - functionally safe, tamper-proof, reliable over the entire service life. In short: Automotive qualified according to ASIL-D. The overall goal of EMPOWER is a hierarchical, scalable platform concept for distributed heterogeneous automotive real-time computing network architectures - Centralized High-Performance Automotive Realtime-Compute on-board networks (Sensor2Edge). The results shall be transferred into automotive production.
ITIV participation
ITIV will develop methods and tools for the exploration of modern accelerator architectures for neural networks. The tools will be used to automatically optimize these architectures in terms of energy efficiency, performance and latency. Another focus in the design of the accelerators is also the support of diagnostics capability and monitorability, as well as the support of dynamic load balancing. This makes it possible to distribute the highly demanding tasks of autonomous driving, for example, among the components in order to achieve a high utilization of the available computing resources.