

Methods for Extending Functions using Intelligent Sensors in Automated Driving
- Subject:Service Oriented Architecture, Regelungstechnik, Automatisiertes Fahren
- Type:Masterarbeit
- Date:ab 12 / 2023
- Tutor:
Methods for Extending Functions using Intelligent Sensors in Automated Driving
Context
Scalable, automated driving functions enable a significant improvement in road safety by reducing human error. The technology is not subject to distraction or fatigue, which often lead to traffic accidents, and therefore has the potential to drastically reduce the number of accidents.
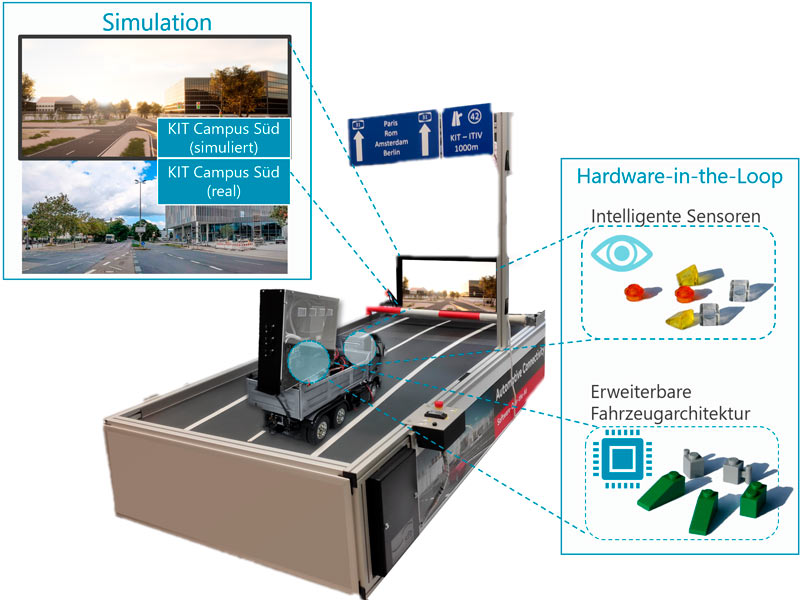
This thesis will look at the merging of two key technologies: Internet of Things and automated driving. One way to combine them is for cars to communicate with each other and with the infrastructure to exchange information about traffic congestion, accidents and other events. Within ITIV's own demonstrator, a scenario is to be developed that illustrates these processes by using a smart camera to send data for AI-supported lane detection to the vehicle, which then processes this information.
Goals
- Development of an AI for lane detection
- Method for wireless integration of an external smart camera into the vehicle
- Elaboration of various scenarios to verify the developed methodology
- Validation on the demonstrator
Requirements
- Good programming skills (C++ and/or Python, Matlab/ Simulink)
- Knowledge in the field of control engineering
- Experience with Linux is helpful