

Real-time capable edge discovery to utilize volatile interoperability between vehicles and IoT end devices
- Subject:Service Oriented Architecture, Regelungstechnik, Automatisiertes Fahren
- Type:Masterarbeit
- Date:ab 12 / 2023
- Tutor:
Real-time capable edge discovery to utilize volatile interoperability between vehicles and IoT end devices
Context
Scalable, automated driving functions enable a significant improvement in road safety by reducing human error. The technology is not subject to distraction or fatigue, which often lead to traffic accidents, and therefore has the potential to drastically reduce the number of accidents.
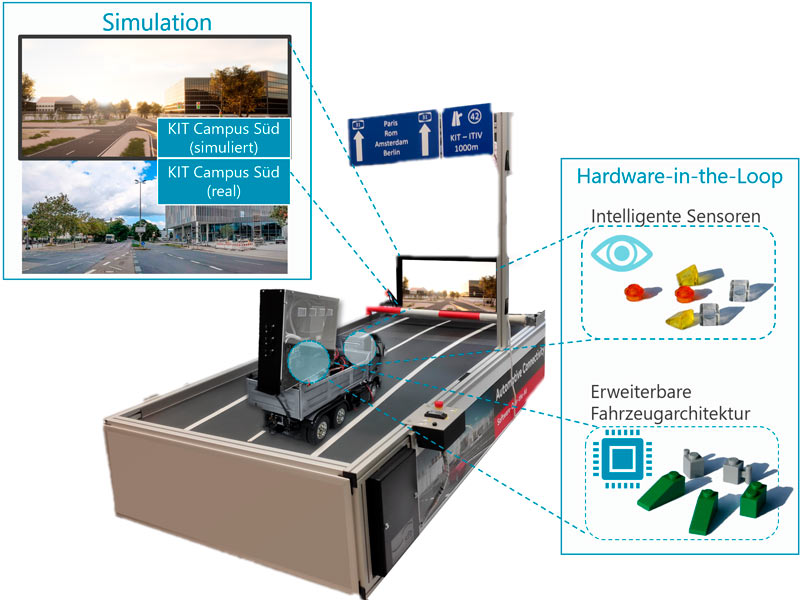
This thesis will look at the merging of two key technologies: Internet of Things and automated driving. One way to combine them is for cars to communicate with each other as well as with the infrastructure to exchange information about traffic congestion, accidents and other events. In order to further expand networking, for example in the form of function outsourcing, it is essential to find methods that enable the vehicle participating in traffic to continuously identify its current edge, i.e. intelligent sensors / vehicles with connectivity compatibility.
Goals
- Development of a method for integrating volatile end devices into vehicle software
- Method for the low-latency discovery phase of edge devices
- Integration of the process in a demonstrator with an open source co-simulation
Requirements
- Good programming skills (C++ and/or Python, Matlab/ Simulink)
- Knowledge in the field of communications engineering is helpful
- Experience with Linux