

Wertstromkinematik
- Contact:
- Project group:
Prof. Becker
- Partner:
KIT: IAI, IAR, IES, IHE, IMI, IPEK, IRS, ITAS, ITIV, wbk; HSKA: IMP;
Industry: GROB, Siemens - Startdate:
01.01.2021
- Enddate:
31.12.2022
Wertstromkinematik
Project goals
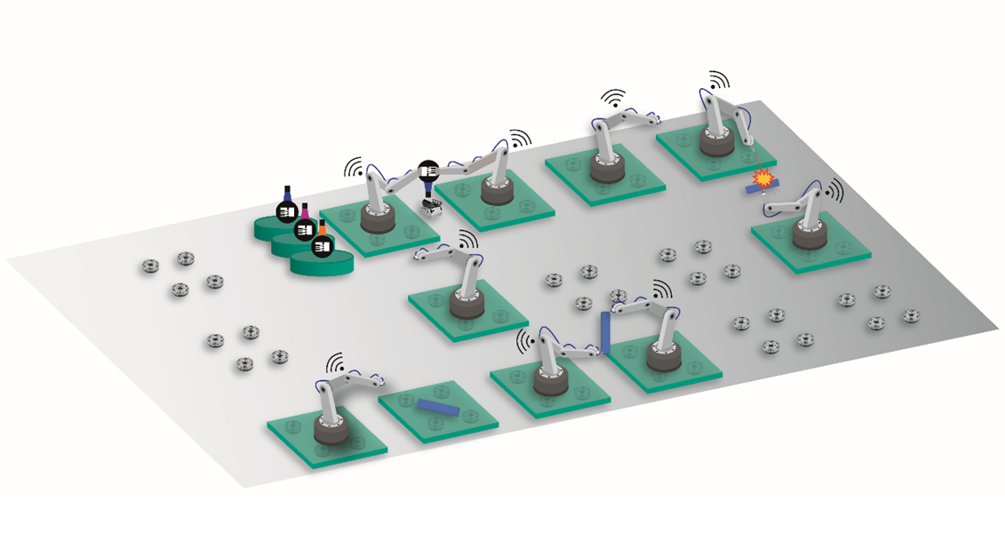
The trend towards individualized production and mass customization requires new concepts in production systems. While companies focusing on flexible manufacturing are able to fulfill individualized production needs, their prices often are compared to competitors using highly-efficient automated production lines. This often leads to the question whether to choose static production lines at high productivity or flexible manufacturing at lower efficiency. To overcome this issue, the Wertstromkinematik project investigates a fundamentally new production system concept, combining a high degree of automation and high flexibility. It bases on the idea of implementing whole production flows using universal robot-like kinematics. Exchangeable end effectors comprising various tools and sensors as well as robot coupling units allow kinematics to conduct various processing steps such as additive manufacturing, cutting, joining as well as quality assurance steps. At the same time, setting up production systems based on these kinematics allows for a flexible mapping of value streams and and simplifies reconfiguration of the production system.
ITIV participation
The Wertstromkinematik concept leads to new challenges towards the data processing and machine control architecture. Control and data processing software components become more complex and need to be added or removed on-line as the production system changes. At the same time, this software needs to be hosted on edge units within the production system network since real-time and latency requirement prohibit moving it to the cloud. Therefore, ITIV is investigating base software architecture concepts for edge units, allowing for the flexible integration and deployment of software components and services and enabling the use of FPGA-based hardware accelerators to speed up complex data processing tasks.