

HAL4SDV
- Contact:
- Project group:
Prof. Becker
- Funding:
Chips-JU (EU + BMFTR)
- Partner:
- Startdate:
01.04.2024
HAL4SDV - Hardware Abstraction Layer for a European Software - Defined Vehicle Approach

Motivation
The HAL4SDV Project is the first in a series of SDV related projects funded by the European Commission Chips-Joint Undertaking and national funding authorities of the countries the Parter organizations are resident. The project overall value amounts to €64,5 Mio, the EC investment is €17,8 Mio widely doubled by the national authorities.
The Project is coordinated by Andreas Eckel, TTTech Computertechnik AG, Vienna Austria, leading a consortium of over 50 Partners and affiliated partners plus 10 Associated Partners. It consists of the leading European OEMs, Tier 1 suppliers, the major European semiconductor manufacturers, SMEs, academic Partners, and foundations representing the European automotive industry and related academia.
In line with the EU Strategic Research and Innovation priorities on Electronic Components and Systems, key European industrial companies, research organizations, and academic organizations from eleven countries started a three-year project to pioneer innovative methods, technologies, and processes for series vehicle development beyond 2030.
The HAL4SDV project mission is to advance European solutions in software-defined vehicles (SDV) and next-generation vehicles. It aims to harmonize efforts across Europe, creating a comprehensive SDV ecosystem while leveraging existing national projects and international R&D activities. By focusing on unifying software interfaces and development methodologies, HAL4SDV will enable software configuration that abstracts from vehicle hardware, paving the way for a "software-defined vehicle" approach for both safety-critical and non-safety-critical applications in future vehicles.
Project goals
- SDV platform SoA based architecture, serving non-safety & safety-related applications
-
Hardware Abstraction Layer (HAL) architecture definition in context of a comprehensive “System + Software” approach
-
HAL developments - standardized interfaces to sensors, actors, compute resources and persistent storage, abstraction using hypervisors, HAL SW updates
-
HAL key software element updates
-
HAL for secure enclaves to build up zero-trust concepts
-
Cloud-based rapid prototyping for SDV
-
COVESA VSS and OSS SDV initiatives
-
IDS solution with the zero-trust framework
-
Security Support for automotive safety-relevant application
-
Security Support for automotive safety-relevant application
-
Portable functions (Web-assembly)
-
Model real-time capabilities and scalability of existing SDV solutions providing access to invehicle data
-
Unified mixed criticality deployment of a SDV system for providing access to in-vehicle data
-
Unified mixed criticality deployment of a SDV system for providing access to in-vehicle data
-
System model & Data analytics - Usage and development of a System model (Hardware & Software) for Nonfunctional characteristics for data/system analysis and possible optimizations
-
Development and configuration tooling, holistic virtualization/simulation environment
Realization of the project
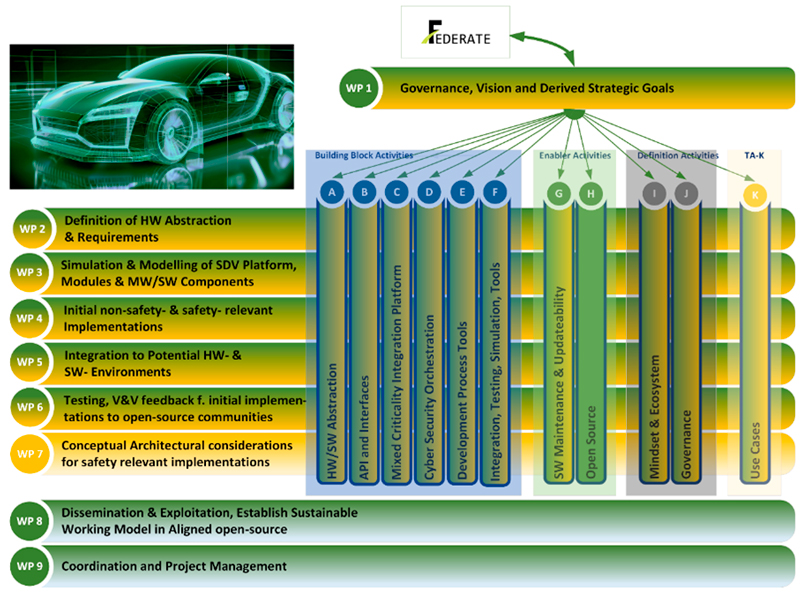
The HAL4SDV Project is structured in a matrix organization composed of 9 Work Packages (WP) following the classic V-Model Approach and a set of Transversal Activities (TA) that cover specific development domains according to Figure 2. The Transversal Activities are further structured by defining “Topics”, whereof the building blocks are deducted. The Work Packages are grouped in “green developments” denoting open-source, non-differentiating and non-safety-relevant developments and “golden developments” representing Intellectual Property (IP) related, differentiating and safety-relevant developments (see Figure).
ITIV participation
In HAL4SDV, KIT is primarily involved in work packages three and four, which focus on the development of simulation and development tools for the safe development of hardware abstraction software for safety-critical and non-safety-critical (software) components in mixed-criticality systems. Furthermore, KIT considers the open source approach to be an important building block of an open, transparent, and modern research landscape.
Funding
This work was funded by the European Chips Joint Undertaking under the Framework Partnership Agreement No. 101139789 (HAL4SDV), including national funding from the German Federal Ministry of Research, Technology and Space (BMFTR) under grant number 16MEE0467. The responsibility for the content of this publication lies with the authors.