

Hardware acceleration of optimization algorithms in non-linear model predictive control
- Subject:Hardware beschleunigte MPCs
- Type:Masterarbeit
- Date:ab 02 / 2024
- Tutor:
- Zusatzfeld:
Thesis at the FZI.
Hardware acceleration of optimization algorithms in non-linear model predictive control
Context
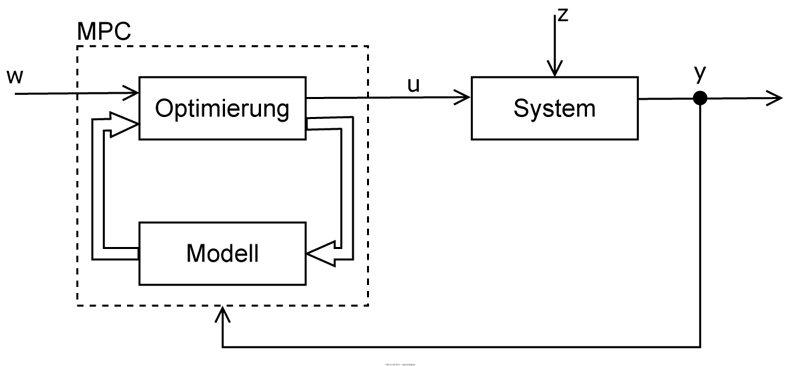
Model predictive control, usually called model predictive control (MPC) or receding horizon control (RHC), refers to advanced control methods that use a process model to predict the future behavior of the system to be controlled. MPCs are used, for example, for trajectory control in robotics, for path planning in autonomous driving or for controlling chemical processes.
MPCs solve optimization problems with constraints and thus determine the control law implicitly. This has many advantages, including the ability to control systems that cannot be controlled using conventional feedback controllers. However, the iterative solution of an optimization problem at runtime also requires significantly more computing power.
Tasks
Within the scope of the work, an exemplary MPC is to be used to investigate where bottlenecks exist in the software implementation of solvers for non-linear optimization algorithms. Calculations are to be identified that can be accelerated by specialized hardware, e.g. by parallelization. Based on the results of this investigation, a hardware architecture for the accelerated calculation of non-linear optimizations will be developed. Finally, this architecture will be implemented on an FPGA and evaluated in comparison to a pure software implementation.
Prerequisites
- Knowledge of a hardware description language: (System-)Verilog, VHDL or Chisel
- Experience in working with C/C++
- Ideally control engineering knowledge of optimal control and model predictive control