

EMDRIVE
- Ansprechperson:
- Projektgruppe:
Prof. Becker
- Förderung:
Bundesministerium für Bildung und Forschung (BMBF)
- Projektbeteiligte:
Infineon Technologies AG, Continental Teves AG & Co. oHG, ZF Friedrichshafen AG, Elektrobit Automotive GmbH, Siemens AG, Kernkonzept GmbH, Ambrosys GmbH, FZI, Uni Lübeck, TU München, Fraunhofer ENAS
- Starttermin:
01.02.2022
- Endtermin:
31.01.2025
EMDRIVE
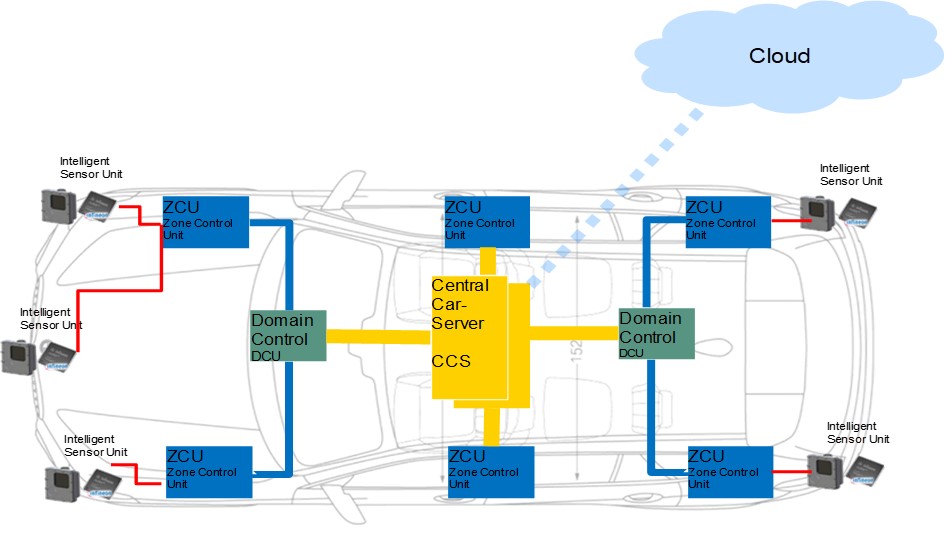
Plattform für verteilte heterogene Automotive-Echtzeit Rechennetzwerk Architekturen
Projektziele
Mit dem Ziel „Autonome Fahrzeuge“ demonstrieren Versuche die technische Machbarkeit perfektionierter Systeme, nicht aber den wirtschaftlichen Einsatz als zuverlässiges Massenprodukt. Energieverbrauch, Echtzeit-Rechenleistung und Hardware-Kosten werden künftigen Anforderungen an Fahrzeug-Computer-Bordnetze nicht gerecht. Mit immer neuen Applikationen steigt die Menge zu verarbeitender Informationen sowie die gesamte Komplexität um ein Vielfaches. Dynamische Beherrschbarkeit: Ein Ausweg sind neue Ansätze, die Datenflut skalierbar mit minimalem Energie- und Kostenaufwand zu verarbeiten – funktional sicher, manipulationsfest, zuverlässig über die gesamte Lebensdauer. Kurz: Automotive qualifiziert entsprechend ASIL-D. Das übergeordnete Ziel von EMDRIVE ist ein hierarchisches, skalierbares Plattformkonzept für verteilte heterogene Automotive-Echtzeit Rechennetzwerk-Architekturen – Centralized High-Performance Automotive RT-Compute Boardnets (Sensor2Edge). Die Ergebnisse sollen über das Projekt hinaus in die Automobilproduktion einfließen.
ITIV Beteiligung
Das ITIV wird Methoden und Tools zur Exploration von modernen Beschleunigerarchitekturen für neuronale Netze entwickeln. Diese sollen mittels der Tools hinsichtlich der Energieeffizienz, Performanz und Latenz automatisiert optimiert werden. Ein weiterer Fokus bei der Auslegung der Beschleuniger liegt außerdem in der Unterstützung der Diagnosefähigkeit und Monitorbarkeit, sowie in der Unterstützung der dynamischen Lastverteilung. Diese ermöglicht es, die hochanspruchsvollen Aufgaben z.B. des autonomen Fahrens auf die Komponenten zu verteilen, um so eine hohe Auslastung der vorhandenen Rechenressourcen zu erreichen.