

Methoden zur Funktionserweiterung durch intelligente Sensoren im automatisierten Fahren
- Forschungsthema:Service Oriented Architecture, Regelungstechnik, Automatisiertes Fahren
- Typ:Masterarbeit
- Datum:ab 12 / 2023
- Betreuung:
Methoden zur Funktionserweiterung durch intelligente Sensoren im automatisierten Fahren
Kontext
Skalierbare, automatisierte Fahrfunktionen ermöglichen eine signifikante Verbesserung der Verkehrssicherheit, da sie menschliches Versagen reduzieren. Die Technologie unterliegt keiner Ablenkung oder Müdigkeit, die oft zu Verkehrsunfällen führen und hat deshalb das Potential die Anzahl der Unfälle drastisch zu reduzieren.
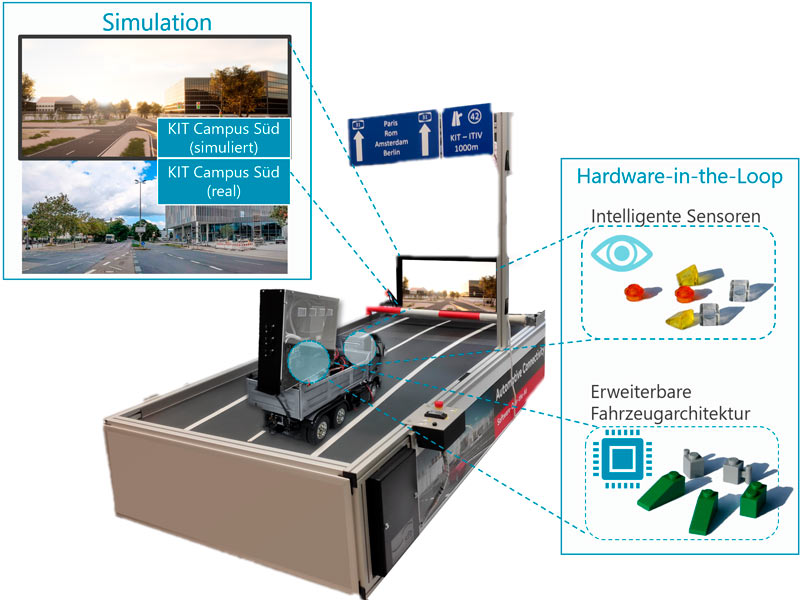
Diese Arbeit soll sich mit der Verschmelzung zweier Schlüsseltechnologien befassen: Internet of Things und automatisiertes Fahren. Eine Möglichkeit zur Kombination derer besteht darin, dass Autos miteinander und mit der Infrastruktur kommunizieren, um Informationen über Verkehrsstaus, Unfälle und andere Ereignisse auszutauschen. Innerhalb eines ITIV eigenen Demonstrators soll ein Szenario entwickelt werden, dass diese Vorgänge verdeutlicht indem eine Smart Camera Daten zur KI-gestützten Fahrbahnerkennung an das Fahrzeug versendet, welches diese Informationen anschließend verarbeitet.
Ziele
- Entwicklung einer KI zur Fahrbahnerkennung
- Methode zur Wireless Integration einer externen Smart Camera ins Fahrzeug
- Ausarbeitung verschiedener Szenarien zur Verifikation der entwickelten Methodik
- Validierung am Demonstrator
Voraussetzungen
- Gute Programmierkenntnisse (C++ und/oder Python, Matlab/ Simulink)
- Kenntnisse im Bereich der Regelungstechnik
- Erfahrung mit Linux ist hilfreich