
Das ITIV-AV erfährt seine Umgebung

Umfeld
Das ITIV-AV ist ein automatisiertes Kleinfahrzeug, das dem ITIV dazu dient, verschiedene Konzepte zum automatisierten Fahren zu untersuchen und zu demonstrieren.
Aufgaben
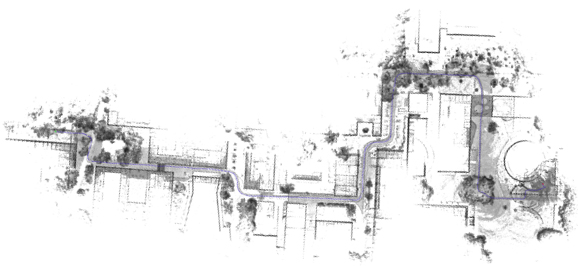
Wie der Titel schon andeutet, soll hier die Kartenerstellung untersucht werden.
Ansätze zur Kartographierung sind bereits implementiert, nun gilt es, diese zu verfeinern.
- Wie kann die automatisiert erstellte Karte ebenso automatisiert bewertet und somit die Auswirkung von Parameteränderungen evaluiert werden?
- Kann man Kartendienste wie OpenStreetMap (OSM) oder Google Maps (GM) dazu verwenden, die Ergebnisse zu verbessern? Wie kann man die selbst erstellten Karten mit diesen vergleichen und eventuell sogar synchronisieren?
- Eine Karte des Campus soll erstellt werden! Hierzu soll eine geeignete Strategie entwickelt werden, diesen systematisch und automatisiert abzufahren. Anschließend soll diese Kartographierung natürlich auch erfolgen.
Voraussetzungen
Neugierde, Forscherdrang und Begeisterung für das Thema, C(++)-Kenntnisse